모터(Motor)관련 전기 및 진동 진단용어
--------------------------------------------------------------------
모터(전동기)에 관해서 설비진단을 하기위해서는 모터의 작동원리를 이해하여야 하는데 우선 이에 따른 전문용어를 알고 있어야 한다. 모터 전문가 및 공무와 정비팀(전기, 계전, 기계)에서 사용하는 용어를 알아듣지 못하게 되면 정작 중요한 분석을 위한 자료가 빈약할 수 밖에 없다. 그 다음에 진단을 하는 것이다. 물론 진단용어도 있지만 의사가 기본 해부학을 배우고 의학용어를 먼저 익히는 것과 같은 방법이라 할 수 있다. 여기에서는 모터관련 전기용어와 진동진단을 위한 용어를 정의하였다.
모터 관련 용어
회전수
회전속도의 정도이며 1분간에 몇 회전 RPM(Revolution Per Minute)으로 표시된다.
토오크(Torque)
회전력을 말하며 kgfm 또는 Nm으로 표시된다.
관성(Inertia)
외력이 작용하지 않는 한 물체가 그 운동 상태를 유지하려고 하는 성질을 말한다.
회전자기장
모터를 회전시키기 위한 발생 자기장을 말한다.
회전센서(RPM sensor, Tachometer, Key phasor)
회전수를 검출하기 위한 장치인데 광 (光)식과 자기식 등의 종류가 있다.
회전불균일
1회전 이내 또는 비교적 단시간에서의 회전 변동을 말한다.
기계적시상수
모터가 기동하기 시작한 다음 정상 회전수의 63%에 도달할 때까지의 시간을 말한다. 이 값이 클수록 모터의 움직임이 느리게 된다.
기동 토오크
모터가 시동할 때에 발생하는 회전력을 말하며 시동 토오크라고도 한다. 이 힘이 클수록 모터의 움직임은 빠르게 된다. (참조: 코깅토오크-공회전시 기본 토오크)
역기전력
모터가 회전 중 모터 내부에 발생하는 유도 전압을 말한다. 단위는 V
콘덴서 모터
기동,구동용으로 콘덴서를 사용한 교류 모터를 말한다. 이 대표적인 것으로는 인덕션 모터, 싱크로너스 모터가 있다.
서보모터
제어를 목적으로 만들어진 특수한 모터를 말한다.
자극 센서
마그넷 로터의 N극, S극을 판별하기 위한 센서의 총칭. 주로 홀 소자가 사용된다.
시트 코일
포토 에칭기술을 사용하여 동판에 평면 모양의 코일 패턴을 형성한 것. 이코일은 박형(薄型)모터를 만들 때 이용된다.
타이밍 모터
전원 주파수에 동기하여 회전하는 모터를 말하며 이것에는 싱크로너스 모터나 PM형 스테핑 모터 등이 있다.
태코 제너레이터
속도 발전기를 말한다.
탈조 현상
스테핑 모터나 싱크로너스 모터가 구동 주파수에 대응하지 않는 이상 작동을 말한다.
초퍼제어
모터의 입력 전력을 ON,OFF함으로써 모터로의 입력에너지를 제어하는 전력 제어 기법을 말한다.
파워레이트
모터가 단위 시간당 낼 수 있는 출력의 정도. 파워레이트
요크
자력선을 통과시키기 위한 통로를 말하는데 계철이라고도 한다.
정격 속도 (Rotor Frequency):
정격 주파수의 전압을 인가하였을 때, 회전자가 실제로 돌아가는 속도, 부하에 따라 속도가 변할 수 있으며, 일반적으로 명판에 게재되어 있음.
동기 속도 (Magnetic Field Frequency):
정격 주파수의 전압을 인가하였을 때, 회전자의 이론적 속도, 무 부하시 회전 속도와 같다.
슬립 주파수(Slip Frequency):
동기 속도와 정격 속도와의 차, 동기 속도(Magnetic field frequency) – 정격 속도(Rotor frequency)
회전자 통과 주파수(Rotor Bar Pass frequency):
회전자 봉의 수X 회전 주파수 (Number of rotor bars x turning speed)
고정자 슬롯 통과 주파수(Slot pass frequency):
고정자의 슬롯 수 X 회전 주파수(Number of stator slots x turning speed)
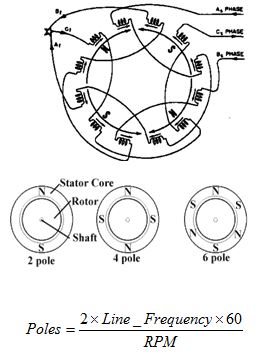
3상 (3 Phase)
권선의 배치방법과 방향에 의해 극수가 결정되며
120도 위상차이가 나 있는 3상 전류는 회전자계를 발생시켜주게 된다. 회전 자계란 N극,S극 사이를 흐르는 자계가 회전한다는 것을 말한다.
극수(Number of Poles)
“극수”란 N극과 S극의 수를 말한다.N극과 S극은 반드시 같이 존재하며 따라서 극수는 항상 짝수이다. 즉 N극과 S극이 한 개씩이면 2극, 두개씩이면 4극 이되는 것이다. 이 극수는 다음의 공식에 의해 회전수를 결정하게 된다.
즉 2극일 경우 3600RPM이며 4극일 경우 1800RPM, 6극일 경우 1200RPM으로 회전수가 결정된다. 그러나 실제로 유도모터에는 유도모터의 원리에 의해 슬립(Slip)이 있기 때문에 2극일 경우 3577RPM 등으로 회전하게 된다. 바로 이 전원주파수에 의한 원리상의 회전수와 실제 회전수의 차이를 슬립(Slip)이라 하며 유도(Induction)모터의 독특한 특성이다.
키워드
|
모터회전수, 슬립주파수, slip frequency, line frequency, 전원주파수, 모터의 고장진단, 결함진단, 모터의 용어,
|